 |
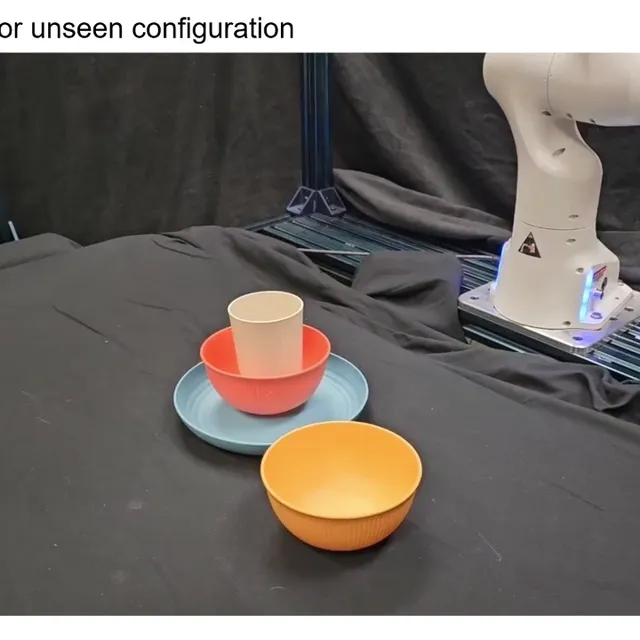
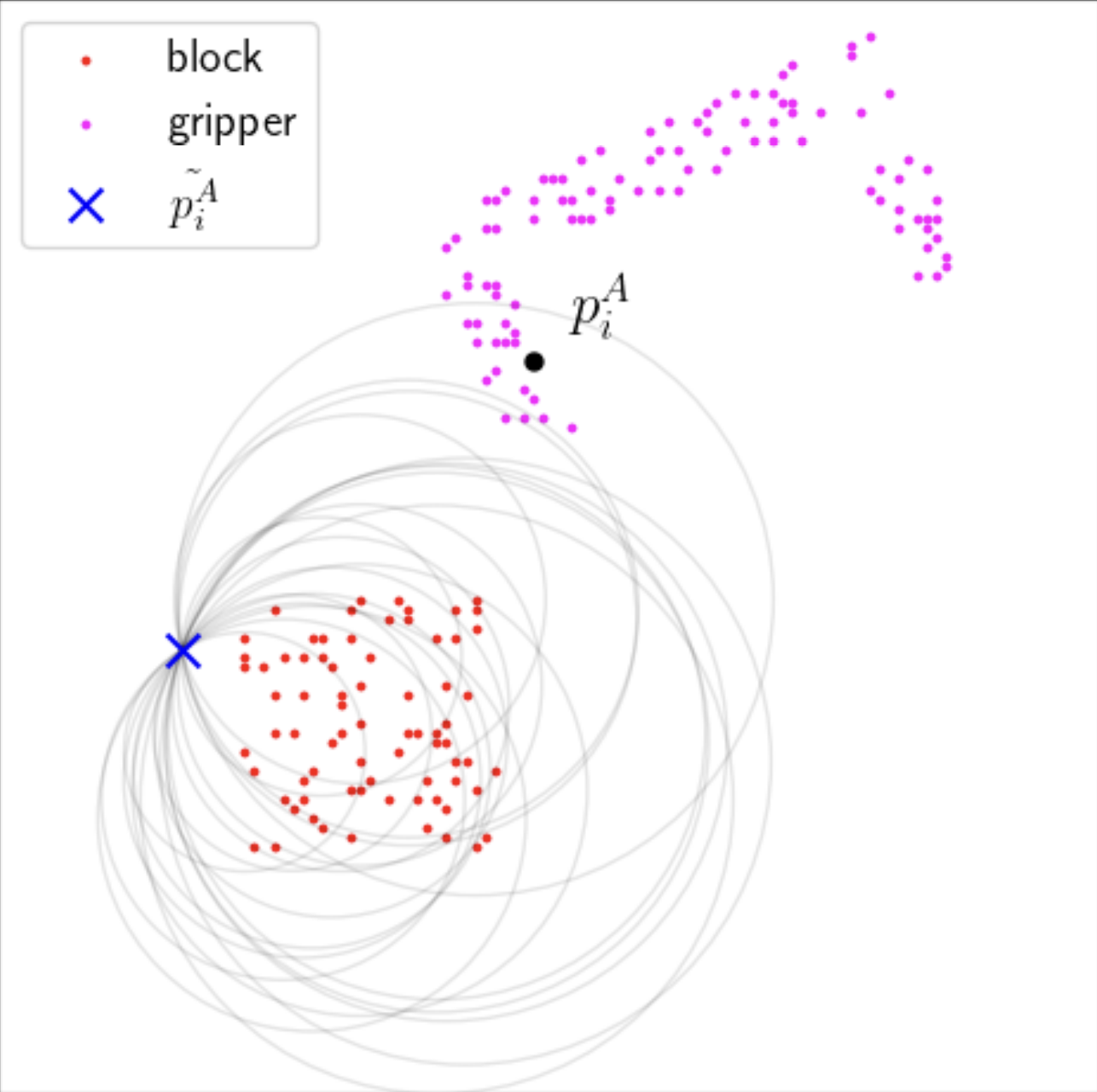
Planning from Point Clouds over Continuous Actions for Multi-object Rearrangement
Kallol Saha*, Amber Li*, Ángela Rodriguez-Izquierdo, Lifan Yu, Ben Eisner, Maxim Likhachev, David Held
CoRL 2025 (Oral - 5.7% acceptance rate)
paper
|
website
|
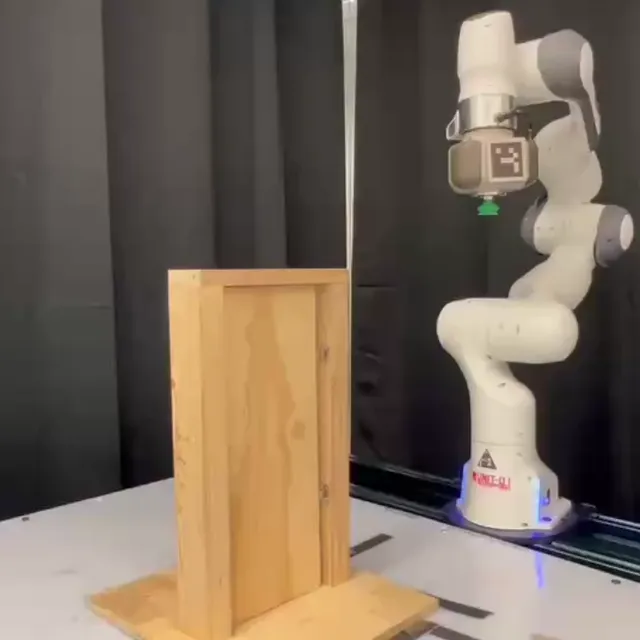 |
Learn from What We HAVE: History-Aware VErifier that Reasons about Past Interactions Online
Yishu Li, Xinyi Mao, Ying Yuan, Kyutae Sim, Ben Eisner, David Held
CoRL 2025
paper
|
website
|
code
|
 |
Non-rigid Relative Placement through 3D Dense Diffusion
Eric Cai, Octavian Donca, Ben Eisner, David Held
CoRL 2024
paper
|
website
|
code
|
 |
FlowbotHD: History-Aware Diffuser Handling Ambiguities in Articulated Objects Manipulation
Yishu Li, Wen Hui Leng, Yiming Fang, Ben Eisner, David Held
CoRL 2024
paper
|
website
|
code
|
 |
Sequential Object-Centric Relative Placement Prediction for Long-horizon Imitation Learning
Ben Eisner, Eric Cai, Octavian Donca, Teeratham Vitchutripop, David Held
Workshop on Learning Effective Abstractions for Planning (LEAP) @ CoRL 2024
paper
|
website
|
code
|
 |
Deep SE(3)-Equivariant Geometric Reasoning for Precise Placement Tasks
Ben Eisner, Yi Yang, Todor Davchev, Mel Vecerik, Jonathan Scholz, David Held
International Conference on Learning Representations (ICLR) 2024
paper
|
website
|
code
|
 |
FlowBot++: Learning Generalized Articulated Objects Manipulation via Articulation Projection
Harry Zhang, Ben Eisner, David Held
CoRL 2023
paper
|
website
|
code
|
 |
On Time-Indexing as Inductive Bias in Deep RL for Sequential Manipulation Tasks
M. Nomaan Qureshi, Ben Eisner, David Held
Learning Meets Model-based Methods for Manipulation and Grasping Workshop @ IROS 2023
paper
|
 |
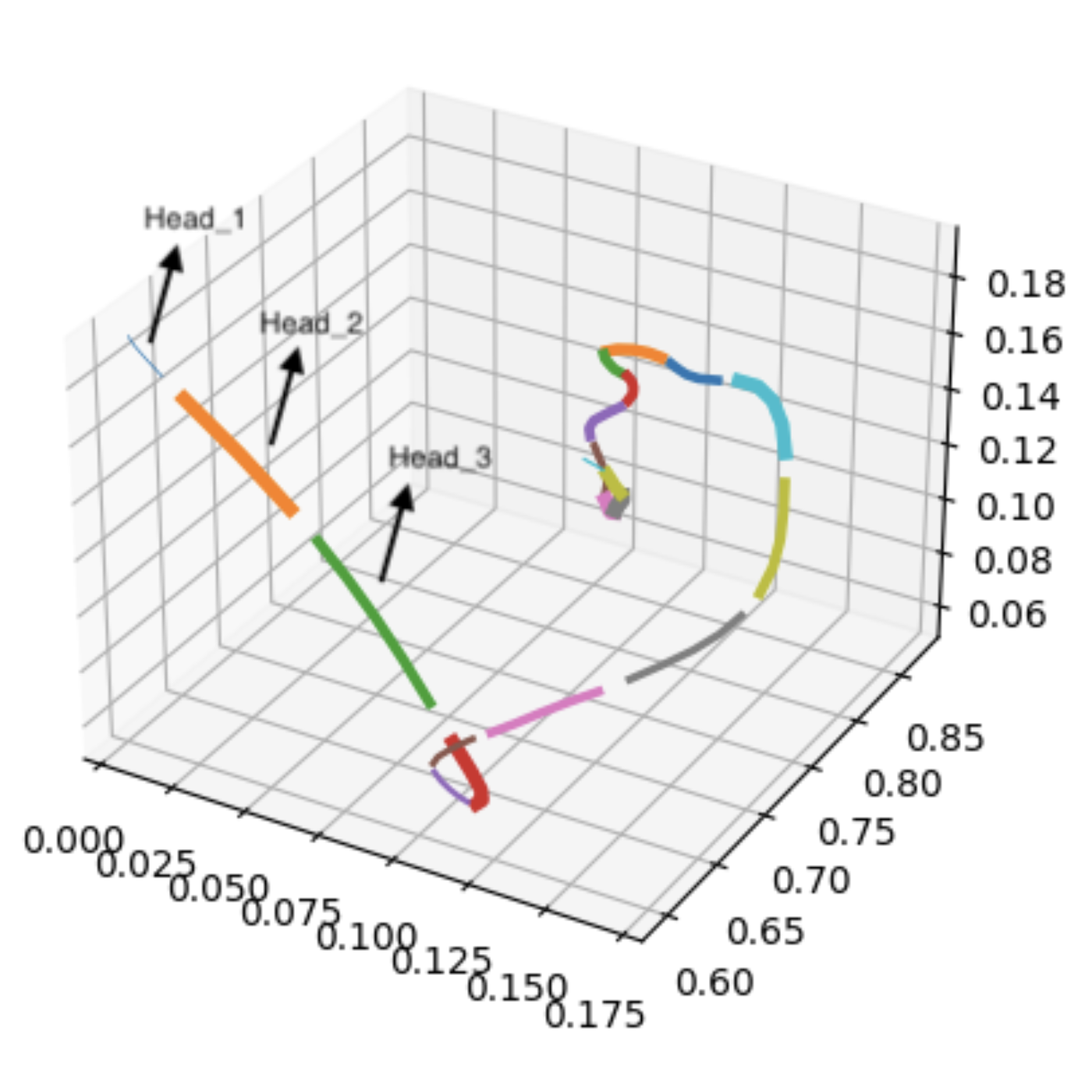
TAX-Pose: Task-Specific Cross-Pose Estimation for Robot Manipulation
Chuer Pan, Brian Okorn, Harry Zhang, Ben Eisner, David Held
CoRL 2022
paper
|
website
|
code
|
 |
FlowBot3D: Learning 3D Articulation Flow to Manipulate Articulated Objects
Ben Eisner, Harry Zhang, David Held
RSS 2022, Best Paper Finalist
paper
|
website
|
code
|
talk
|
 |
Deep Sequenced Linear Dynamical Systems for Manipulation Policy Learning
M. Nomaan Qureshi, Ben Eisner, David Held
ICLR 2022 Workshop on Generalizable Policy Learning in Physical World
paper
|
website
|
code
|
 |
Self-supervised Transparent Liquid Segmentation for Robotic Pouring
Gautham Narasimhan, Kai Zhang, Ben Eisner, Xingyu Lin, David Held
ICRA 2022
paper
|
website
|
code
|
 |
Robotic Grasping through Combined Image-Based Grasp Proposal and 3D Reconstruction
Daniel Yang, Tarik Tosun, Ben Eisner, Volkan Isler, Daniel Lee
ICRA 2021
paper
|
 |
Reward Prediction Error as an Exploration Objective in Deep RL
Riley Simmons-Edler, Ben Eisner, Daniel Yang, Anthony Bisulco, Eric Mitchell, Sebastian Seung, Daniel Lee
IJCAI 2020
paper
|
 |
Pixels to Plans: Learning Non-Prehensile Manipulation by Imitating a Planner
Tarik Tosun, Eric Mitchell, Ben Eisner, Jinwook Huh, Bhoram Lee, Daewon Lee, Volkan Isler, Sebastian Seung, Daniel Lee
IROS 2019
paper
|
 |
Q-Learning for Continuous Actions with Cross-Entropy Guided Policies
Riley Simmons-Edler, Ben Eisner, Eric Mitchell, Sebastian Seung, Daniel Lee
ICML 2019 Workshop on RL4RealLife
paper
|
 |
Deep Learning Methods for 3D Segmentation of Neural Tissue in EM Images
Ben Eisner, Daniel Yang, Anthony Bisulco, Eric Mitchell, Sebastian Seung, Daniel Lee
Princeton University Senior Thesis
paper
|
code
|
 |
emoji2vec: Learning emoji representations from their description
Ben Eisner, Tim Rocktäschel, Isabelle Augenstein, Matko Bošnjak, Sebastian Riedel
Best Paper atEMNLP 2016 Workshop on SocialNLP
paper
|
code
|
